|
Publications Publications Reinforcement Learning & Systems Intelligence @ UEC Tokyo |
Home / People / Publications / Projects |
Journal Articles & PreprintsThis page currently lists works led or co-authored by Zhiqiang He. |
|
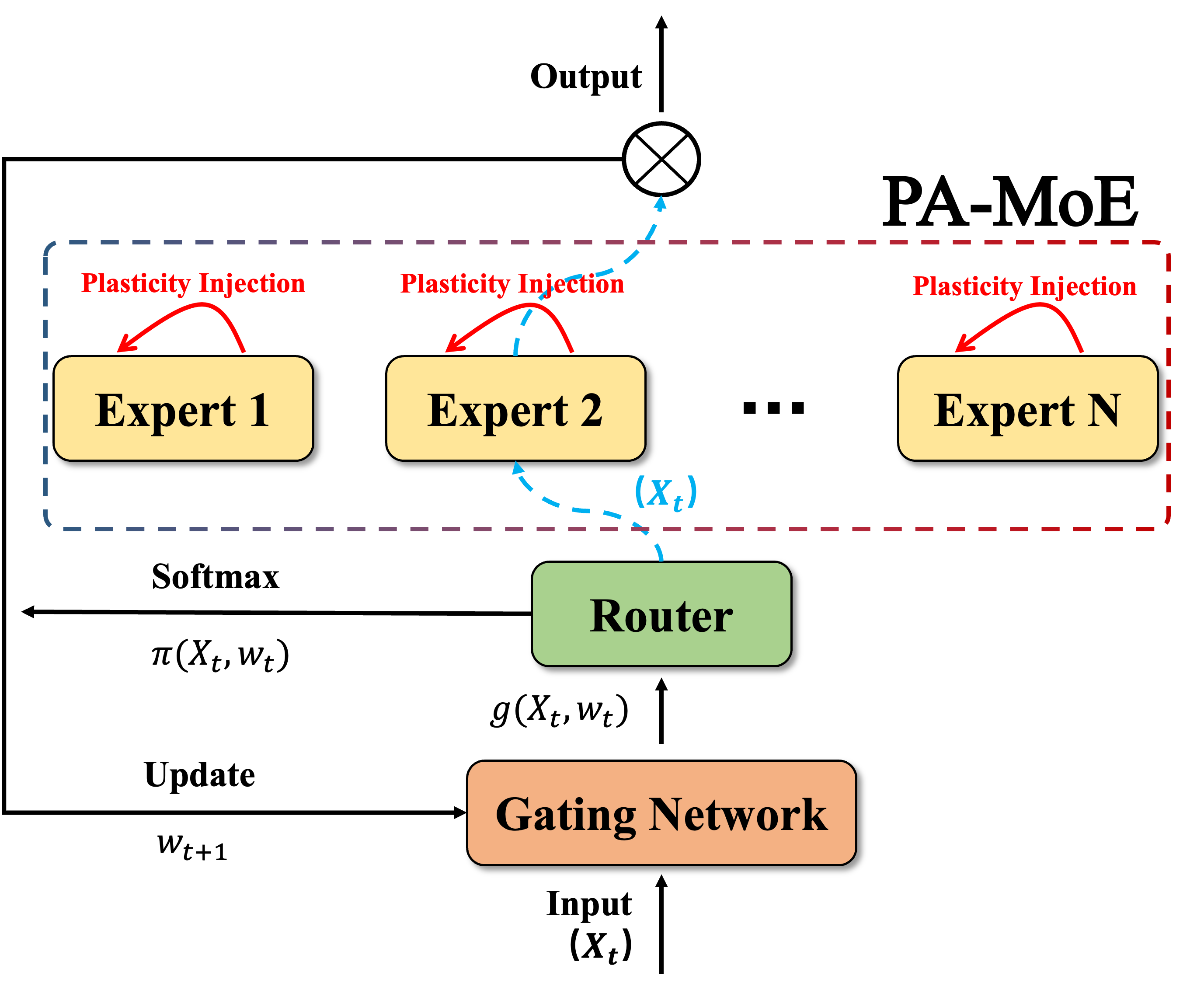
Plasticity-Aware Mixture of Experts for Learning Under QoE Shifts in Adaptive Video Streaming Zhiqiang He, Zhi Liu, IEEE Transactions on Multimedia (Accepted), 2026. (IF=9.7, Q1) Source Code | Download PDF | Response 1 PDF | Response 2 PDF Mitigate plasticity loss in mixture-of-experts under shifting objectives, with theoretical justification. |
|
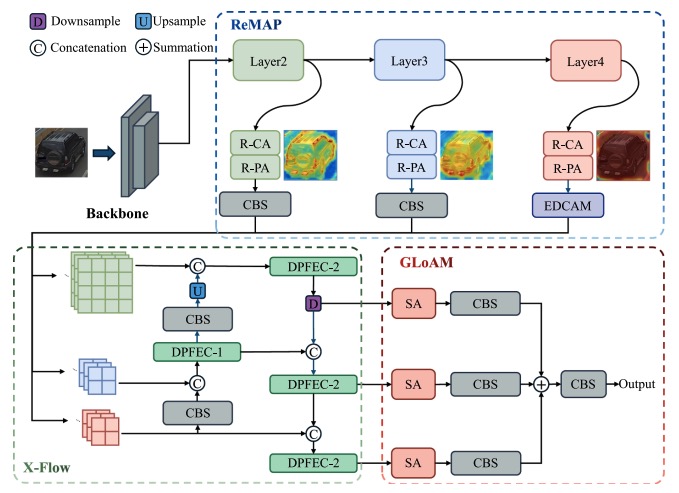
DiPerceiveNet: A bidirectional cross-scale perception network for vehicle re-identification Jihao Cai, Zhiqiang He, Zhi Liu, Yangjie Cao, Pattern Recognition, 2026. (IF=7.6, Q1) Download PDF A Dual Interaction Perception Network (DiPerceiveNet) is designed to establish a unified and iterative information flow. |
|
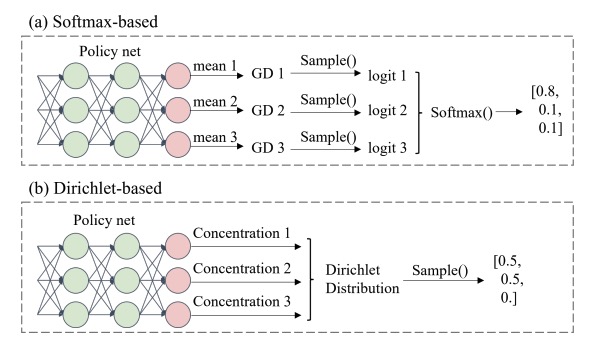
Scalable and Reliable Multi-agent Reinforcement Learning for Traffic Assignment Leizhen Wang, Peibo Duan, Cheng Lyu, Zewen Wang, Zhiqiang He, Nan Zheng, Zhenliang Ma Communications in Transportation Research, 2025. (IF=14.5, Q1) Source Code | Download PDF A scalable multi-agent approach focusing on the action space policy. |
|
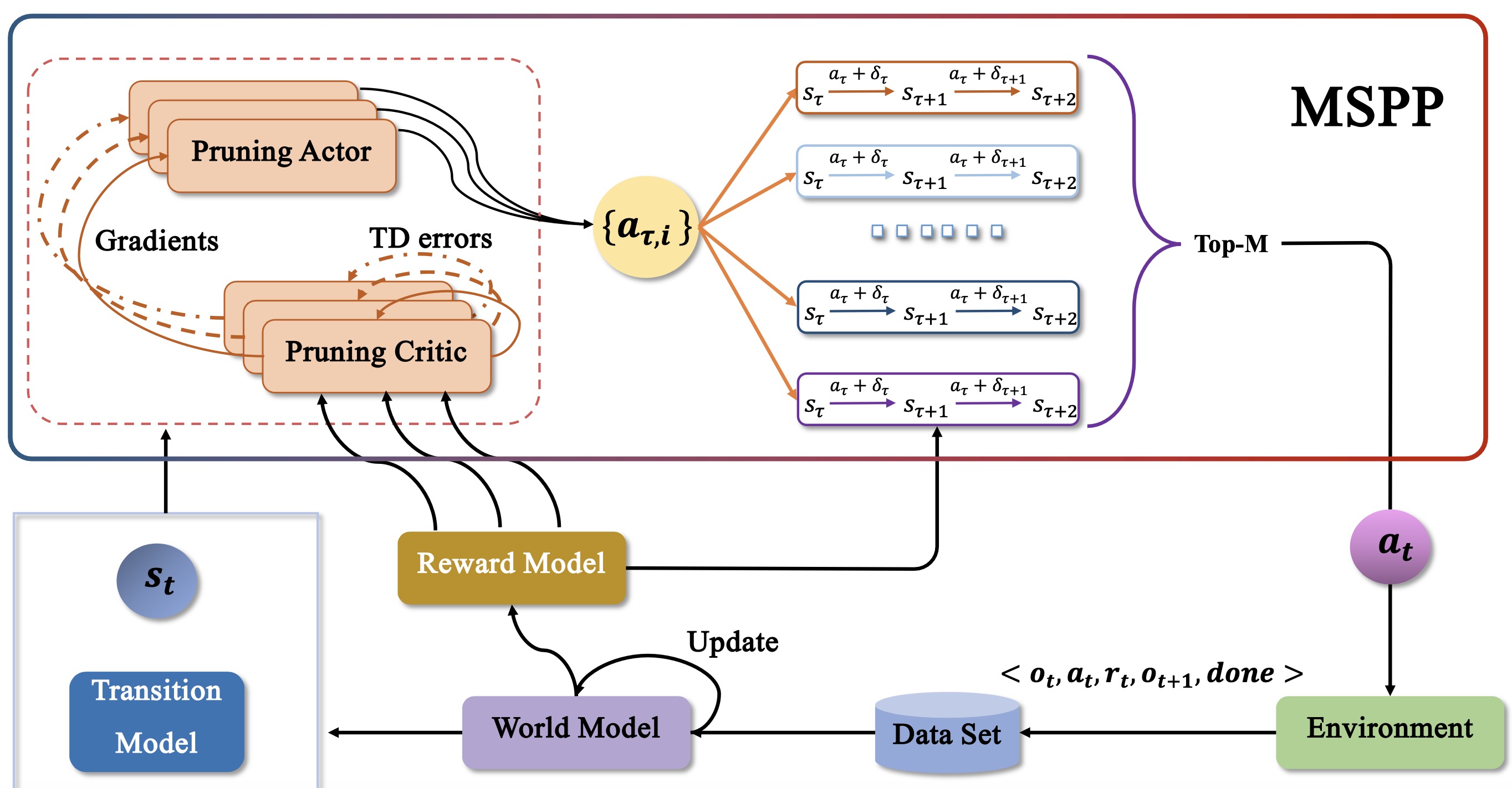
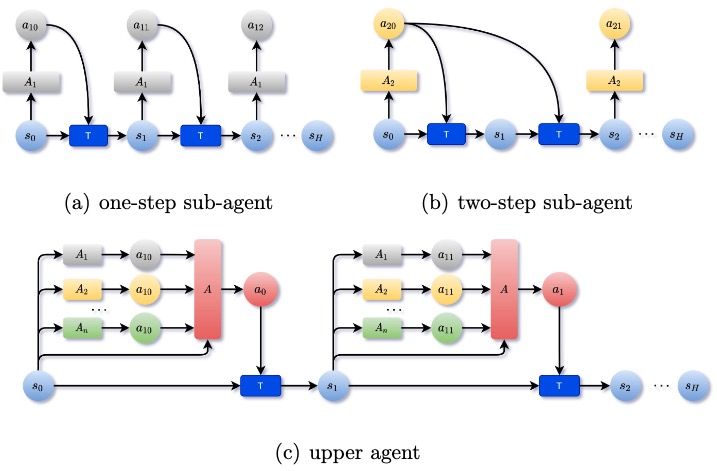
Understanding World Models through Multi-Step Pruning Policy via Reinforcement Learning Zhiqiang He, Wen Qiu, Wei Zhao, Xun Shao, Zhi Liu Information Sciences, 2025. (IF=8.1, Q1) Source Code | Download PDF Parallel Multi-Step Pruning Policies enhance diversity sampling, with convergence analysis for MSPP and its policy gradient theorem. |
|
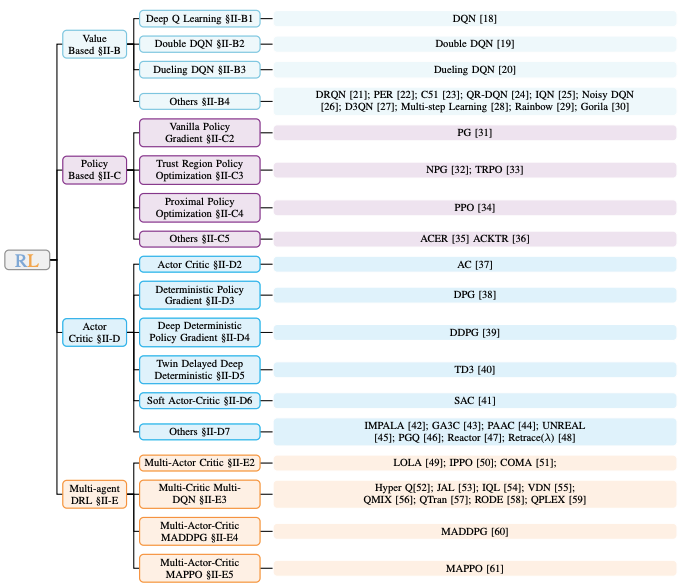
A Survey on DRL based UAV Communications and Networking: DRL Fundamentals, Applications and Implementations Wei Zhao, Shaoxin Cui, Wen Qiu*, Zhiqiang He*, Zhi Liu, Xiao Zheng, Bomin Mao, Nei Kato IEEE Communications Surveys & Tutorials, 2025. (IF=42.8, Q1) — *Corresponding author This survey outlines the evolution of fundamental reinforcement learning theory, highlighting how core challenges have driven the development of new methods. |
|
Erlang planning network: An iterative model-based reinforcement learning with multi-perspective Jiao Wang, Lemin Zhang, Zhiqiang He, Can Zhu, Zihui Zhao Pattern Recognition, 2022. (IF=8.5, Q1) Source Code | Download PDF Bi-level reinforcement learning for model-based reinforcement learning. |
|
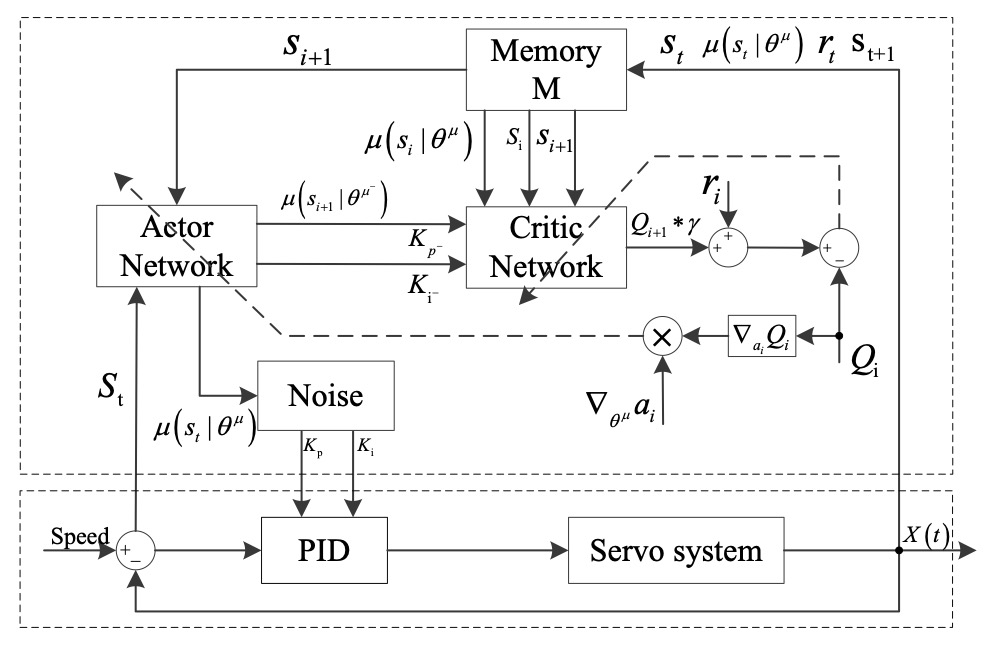
Control Strategy of Speed Servo Systems Based on Deep Reinforcement Learning Pengzhan Chen, Zhiqiang He, Chuanxi Chen, Jiahong Xu Algorithms, 2018 Source Code | Download PDF (Cited 58 times) One of the first works applying reinforcement learning to jump speed servo systems. |
|
If you are interested in any of these works or in collaborating on related topics, please feel free to contact me by email. |
|
Back to Home. |